Spherical Five Bar (SFB) linkage based tail module

The tail module has probably been my most challenging project so far. Not that the actual mechanism itself is particularly complex. All in all, it is just a 2-DoF parallel linkage mechanism; certainly not trivial but not something unsurmountably difficult. The most time consuming part is the analysis and modeling of this mechanism. After all, what use is a robot if nobody knows how to control it?
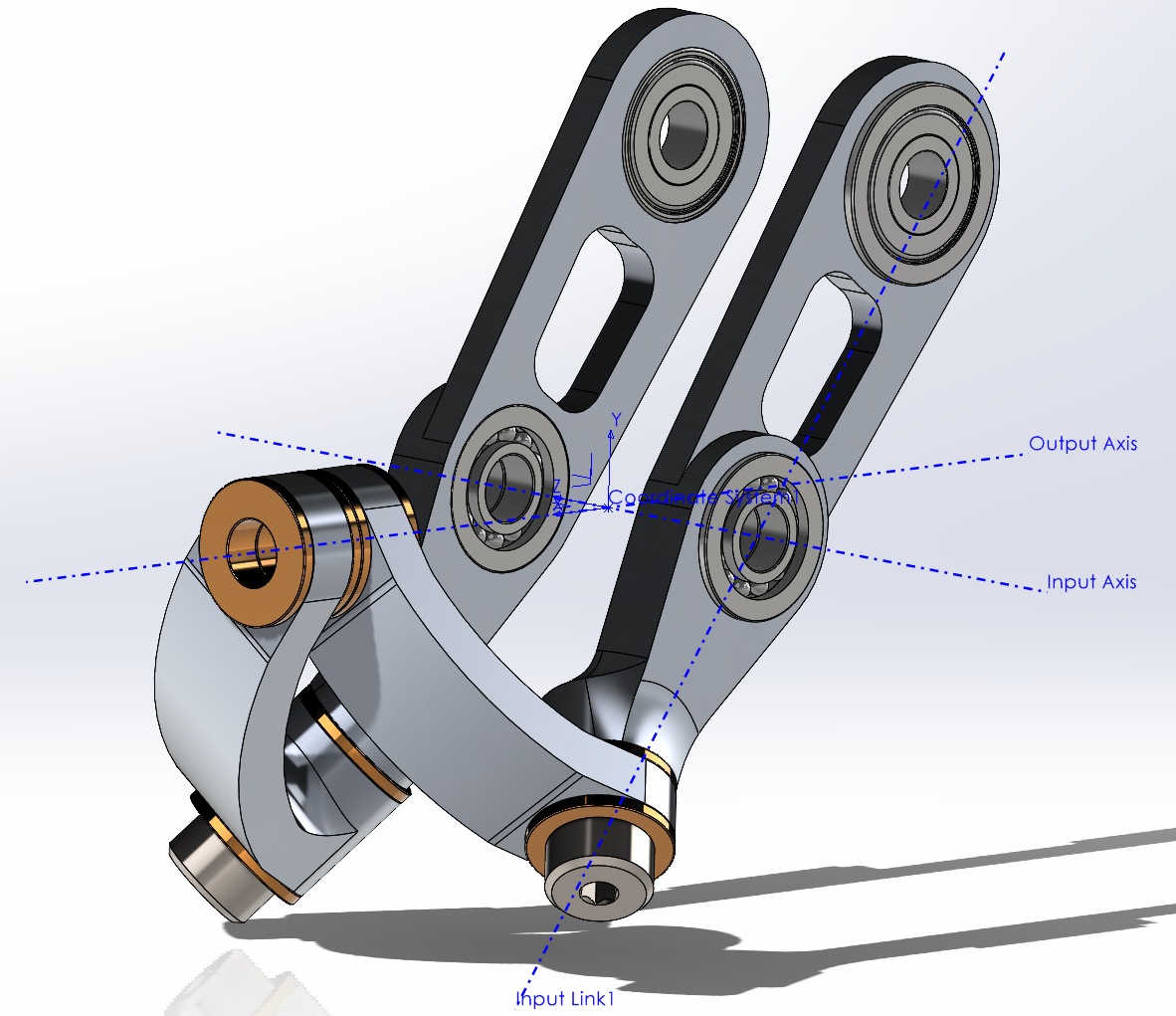
I ended up teaching myself spherical trigonometry just so I can derive proper Jacobians and kinematic equations for this thing. A very important sub-problem in this tail design is the design of the actuator module, which I will detail in a seperate page.
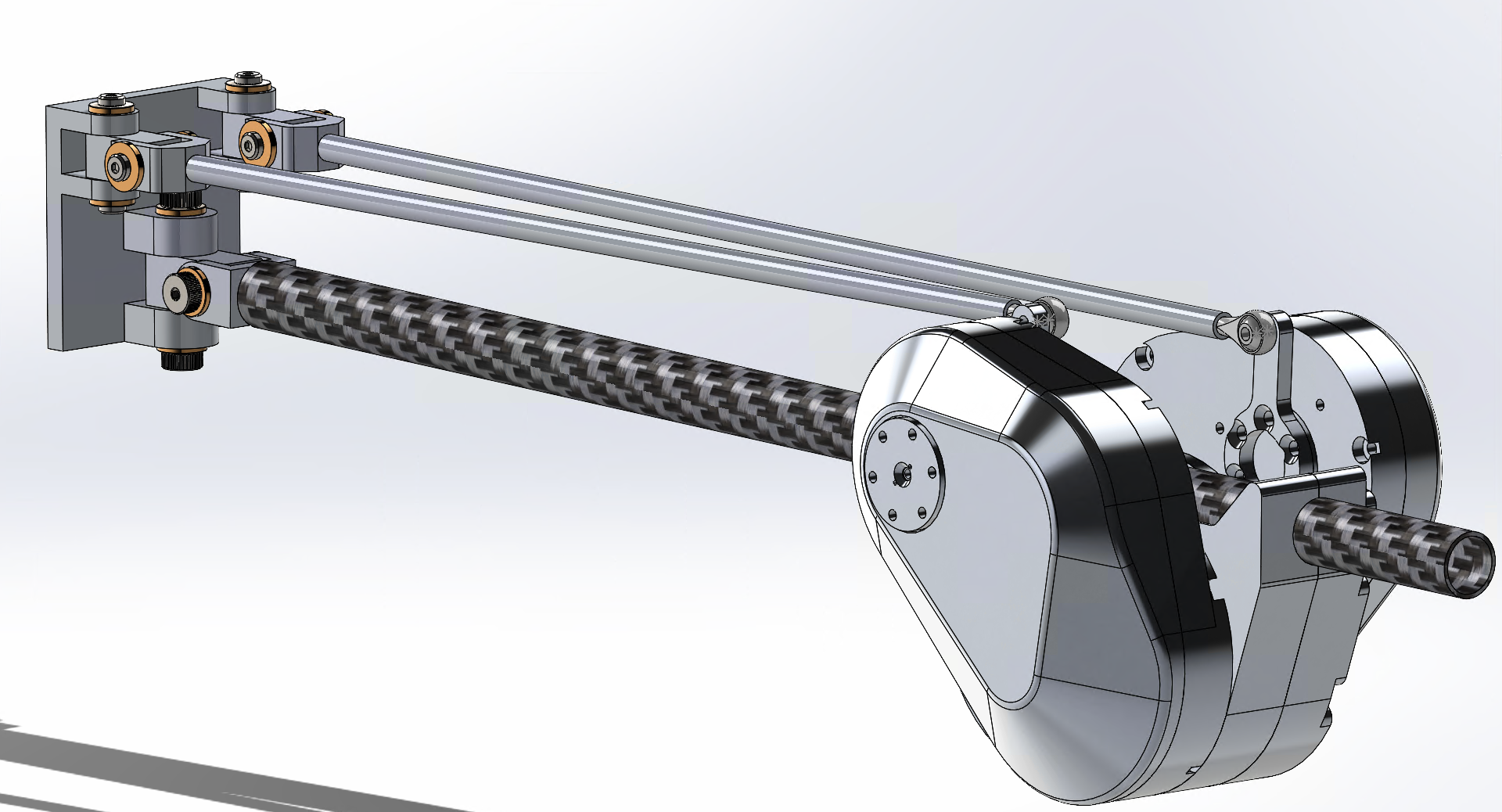
I had some doubts about whether or not the SFB linkage is actually an optimal mechanism basis to design around, so I went and designed another mechanism to compare it with, just in case. I also threw the battery of parallel linkage analysis I taught myself at it, for good measure.
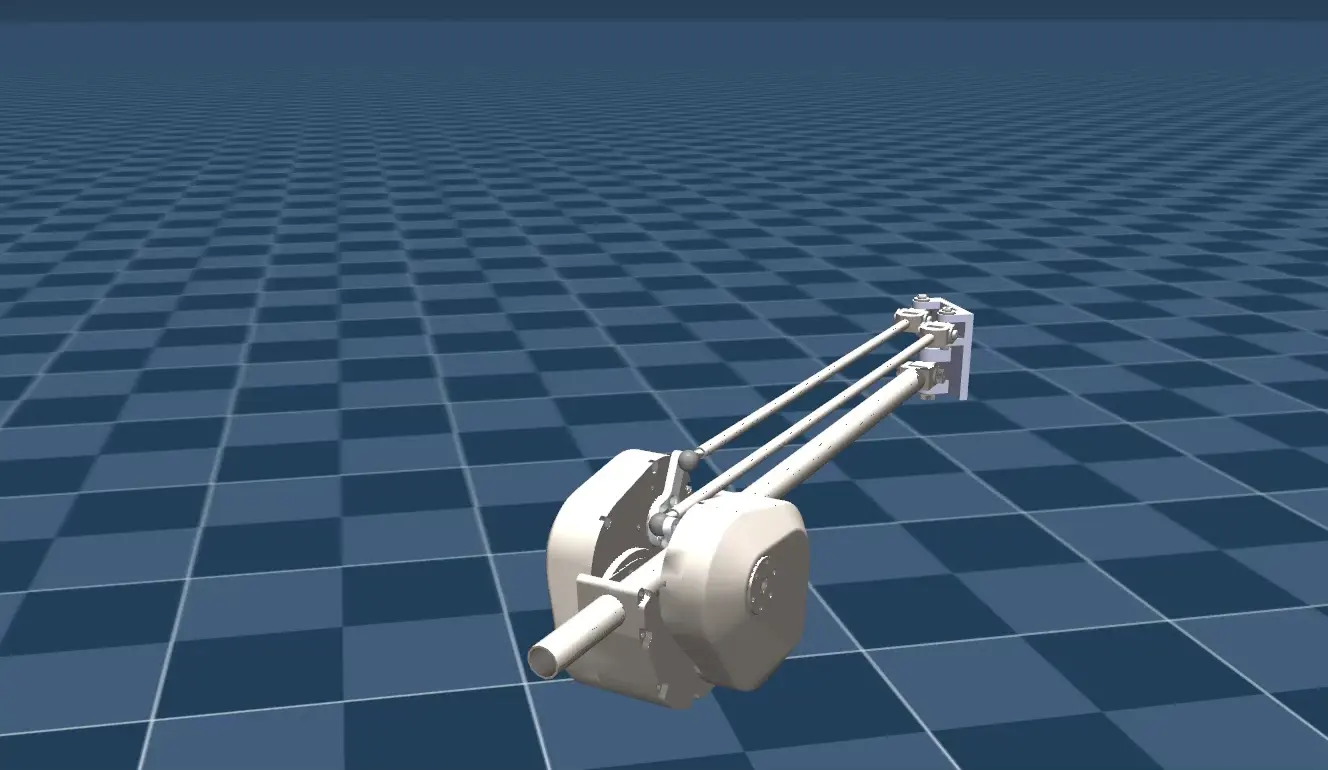
Here it is running a left-right swing motion using a simple workspace PD controller, simulated in Mujoco. Support for closed linkage mechanisms in Mujoco is very helpful, and my IK/FK algorithms works pretty well.