Hello! I'm Yichen Wang
I am a robot researcher and engineer, working on developing hardware and software infrastructure for agile and dextrous walking robots.
I recently completed my MS in Robotics from the Department of Robotics at the University of Michigan. I am a member of the ARCaD Lab, advised by Prof. Yanran Ding. I also completed my BS in Mechanical Engineering from the University of Michigan in 2025.
Research Work

Human-Interface Dynamics of Knee Exoskeletons with Lateral and Anteroposterior Attachment
Yichen Wang, José Montes Pérez, Robert D Gregg, Gray C. Thomas
2025 International Conference On Rehabilitation Robotics (ICORR) • 2025
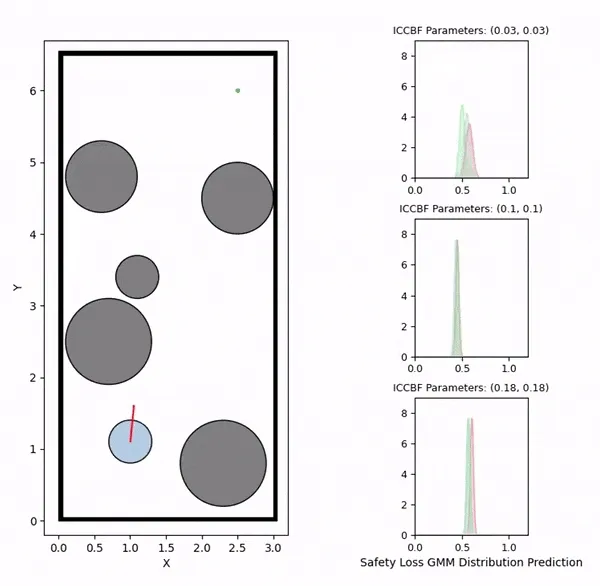
Kinodynamic Model Predictive Control for Energy Efficient Locomotion of Legged Robots with Parallel Elasticity
Yulun Zhuang, Yichen Wang, Yanran Ding
2025 IEEE International Conference on Robotics and Automation (ICRA) • 2025
Ongoing and Unpublished Work
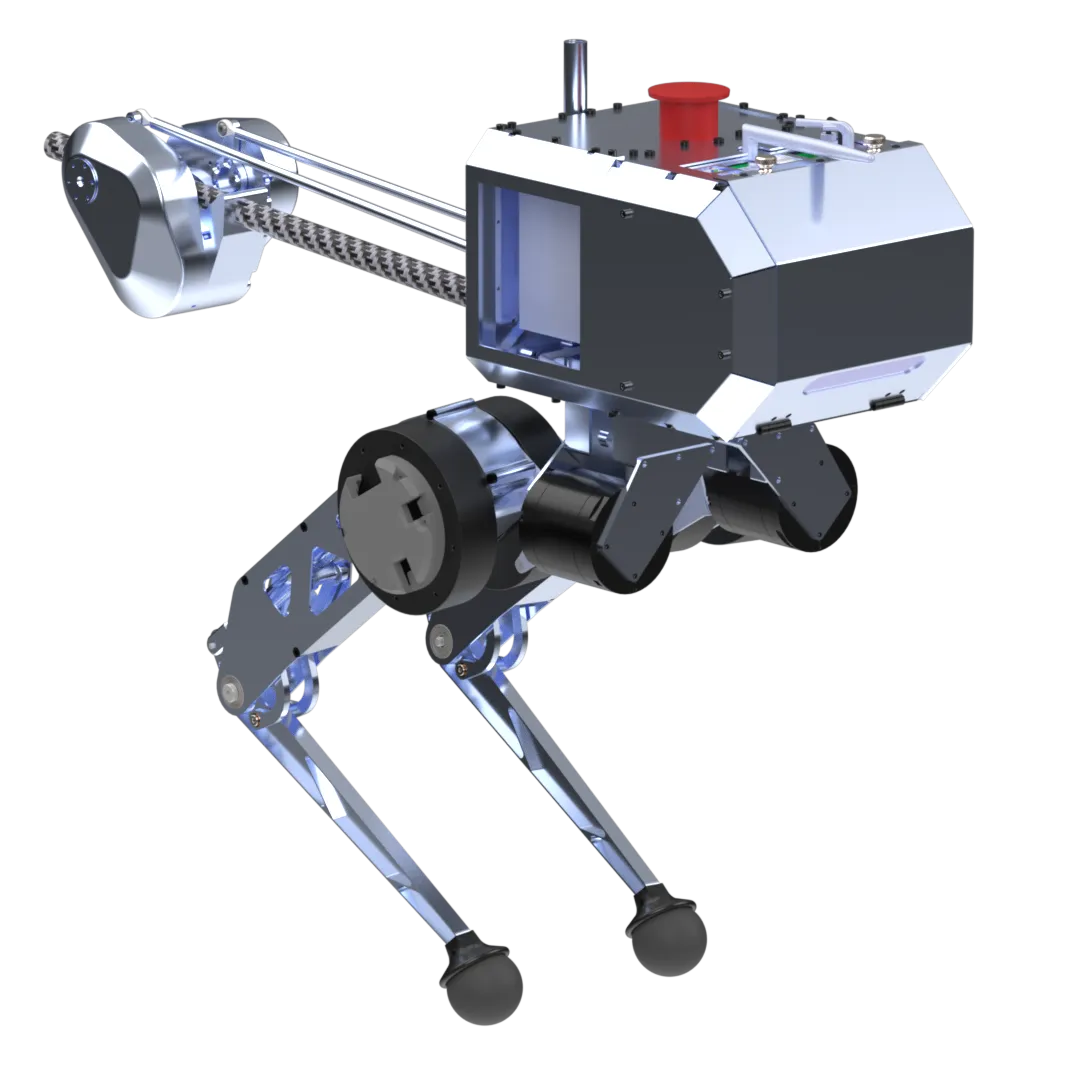
Agile Bio-inspired Tailed Biped with Parallel Elasticity
This is an ongoing project to design the hardware, electronic, and software system of a bipedal robot, using the hopping leg and SFB tail as subassemblies.
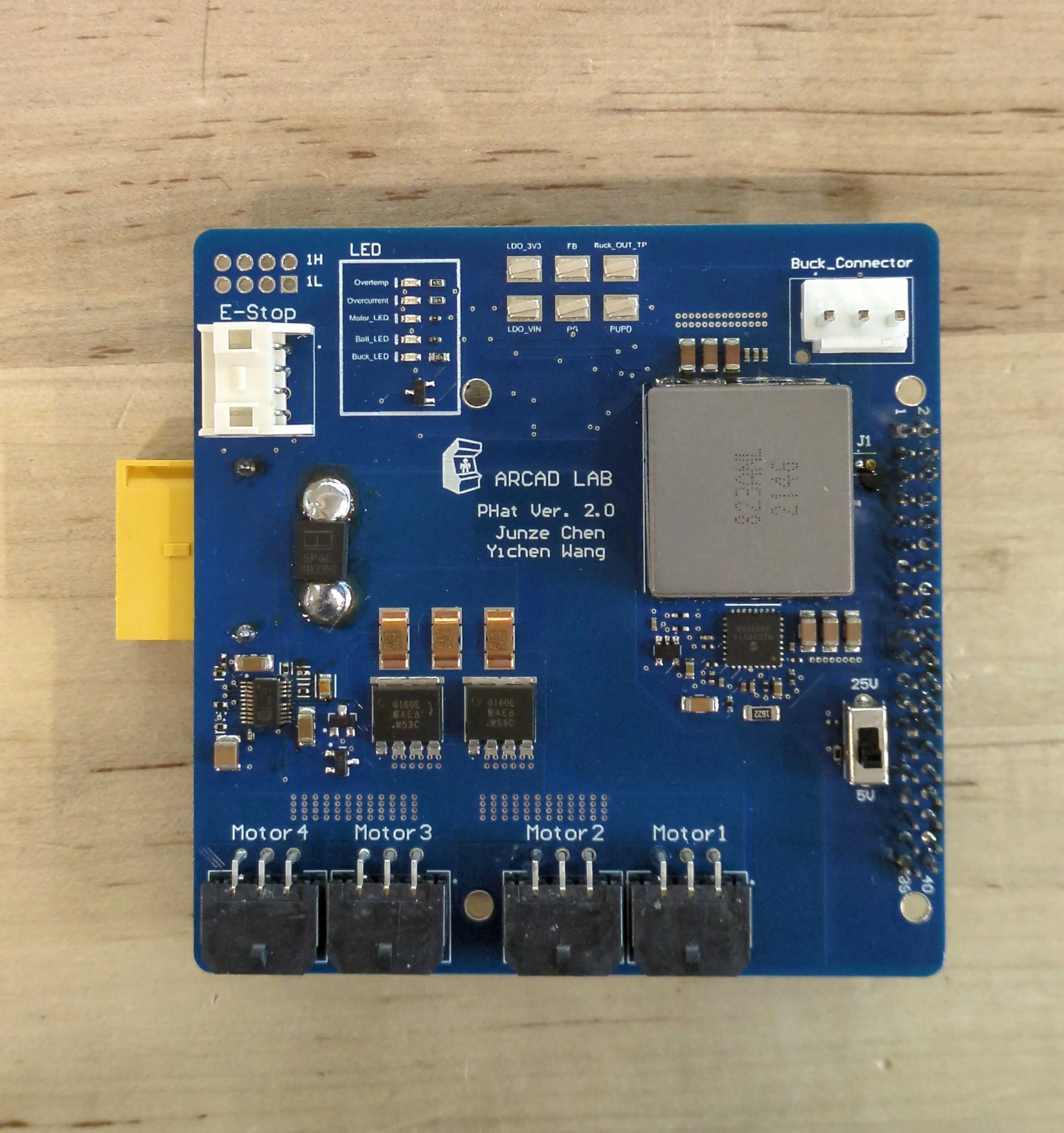
Power Hat for Computing Module in Bipedal Robot
Power Supply, Protection, and Monitoring Hat for Robot Onboard SBC
I lead the project to design a power supply and control hat, compatible with the Rasberry Pi and UP Xtreme i14 SBCs. The board consists of a buck converter capable of either 5V/5A or 25V/4A output, a power switch to supply 50V/80A to 4 motor rails, overcurrent, undervoltage, and overtemperature protection circuits, and voltage, current, and temperature monitoring.
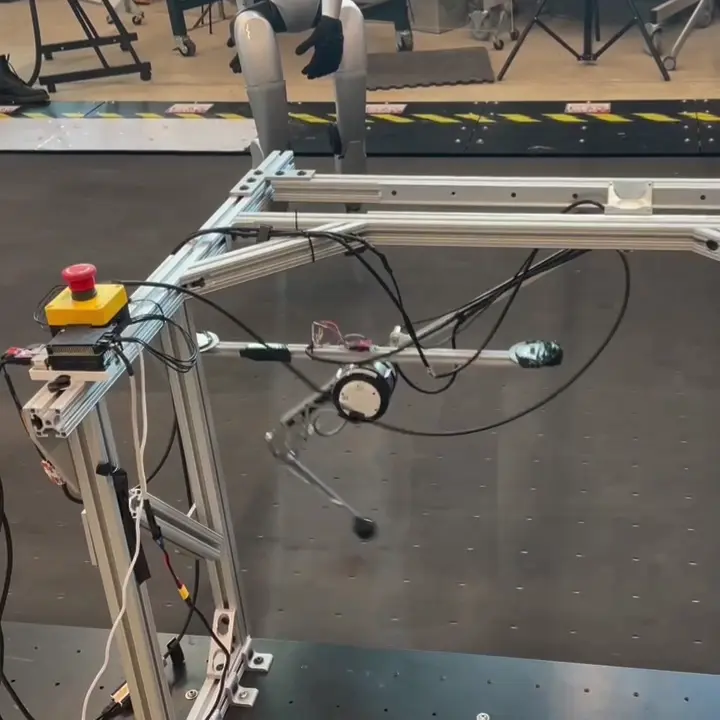
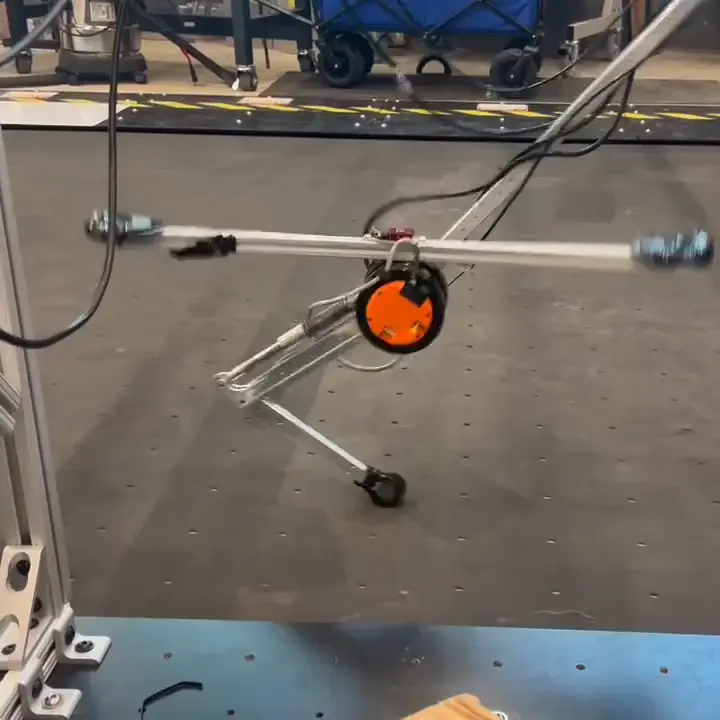
Hopper V2
During the hardware tests for the Kinodynamic MPC paper, we found quite a few minor issues with the robot that added up to make working with the robot rather frustrating. I sat down and designed a new version of it where I ironed out all the issues with assembly, fatigue failures, and sensor integration. The leg is mounted on the a gantry as a preliminary sub-assembly test for a future biped robot.

Spherical Five Bar (SFB) linkage based tail module
When designing the bipedal robot, I thought it would be a bit boring if it's just two legs and a body. So I designed a tail module to do inertial reorientation for the robot! I used an SFB coupled with two custom designed motor modules to actuate the tail. The motors double as the counterweight to increase tail inertia to eliminate any dead weight.

Lightweight QDD motor module for tail
During the initial conceptualization for the tail module, I realized that no motor module on the market met the specific mass and torque requirements necessary. I therefore designed a lightweight gearmotor module using a drone motor as the base, and coupled it with two 1:4 reduction stages. The end result is module weighing just 215g, with a max torque of 10Nm and rated torque of 3Nm.